製品概要
“JS-EtherCAT Professional SDK” for RZ/T1とは…
EtherCAT ソフトウェアソリューションです。ソフトウェア開発に必要な基本コンポーネントが既に用意されている為、EtherCAT開発を
『より早く、簡単』に実現できます。お客様のRZ/T1におけるEtherCATスレーブ開発を強力にサポート致します!!
『より早く、簡単』に実現できます。お客様のRZ/T1におけるEtherCATスレーブ開発を強力にサポート致します!!
SDKのBlock Diagramと対応機能
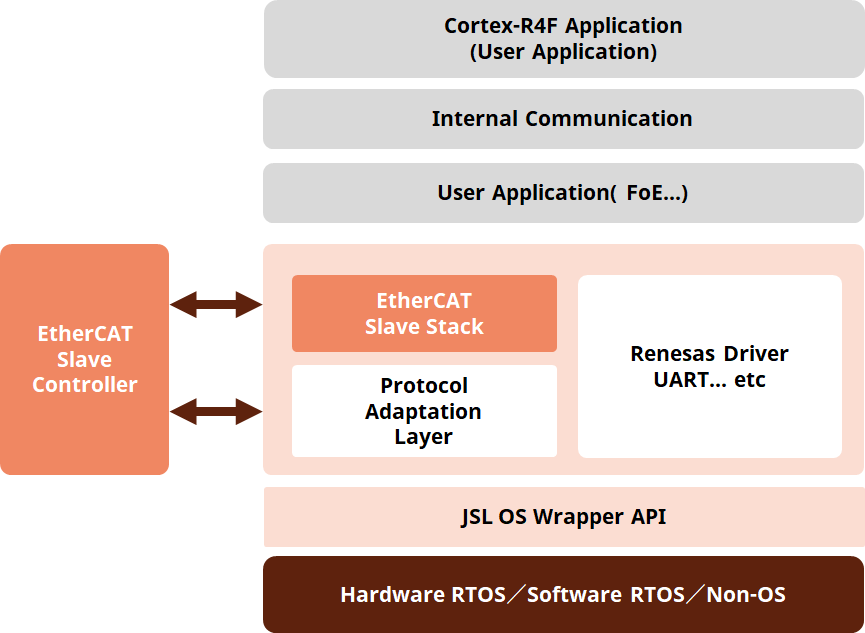
Cortex-R4F Application
各種ハードウェア制御などを実装可能です。
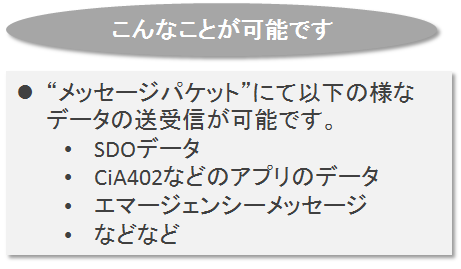
Internal Comunication
プロセスデータとメッセージ交換の標準的な通信処理が実装されています。
User Application
サンプルアプリが実装されています。DC/FoEといった機能がデフォルトで実装されております。
Beckhoff EtherCAT Slave Stack
SDKではBeckhoff社のWEBよりダウンロードしたコードを特定フォルダに格納する
だけで、ビルドして使用出来る状態で提供致しています。
EtherCAT Slave Controller
![]() RZ/T1に内蔵したEtherCAT IPです。
RZ/T1に内蔵したEtherCAT IPです。![]()
![]()
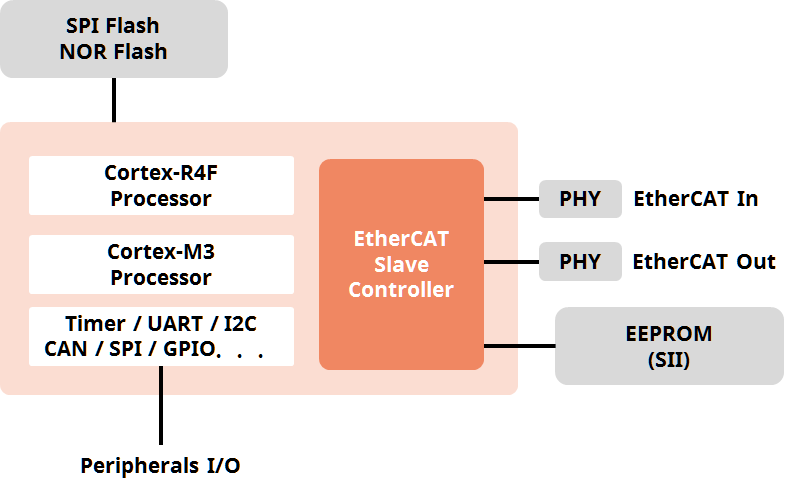
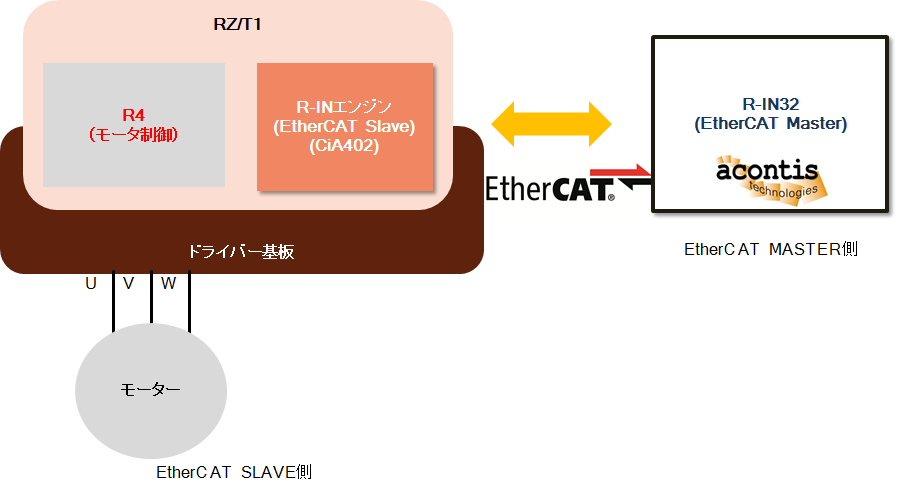
ハードウェア構成
このようなお客様にお勧めです
・RZ/T1を使用した開発が不慣れなお客様
・”CiA402″や”SEMIプロファイル”に対応したいお客様
特長
内部インターフェース対応
![]() Cortex-R4FとCortex-M3との内部インターフェースを サポートしています。
Cortex-R4FとCortex-M3との内部インターフェースを サポートしています。![]()
内部インターフェースとして以下の機能を搭載しています。
- PDO入力データの転送(最大2048byte)
- PDO出力データの転送(最大2048byte)
- メッセージパケットの送受信(最大1024byte)
- 更新タイミングの割り込み通知
- 更新許可信号による排他制御
- EtherCAT基本ステータス通知
内部BUSインターフェースの仕様書を入手されたいお客様は
お気軽に『お問い合わせフォーム』から仕様書希望の旨、ご連絡下さい。
開発環境
統合環境
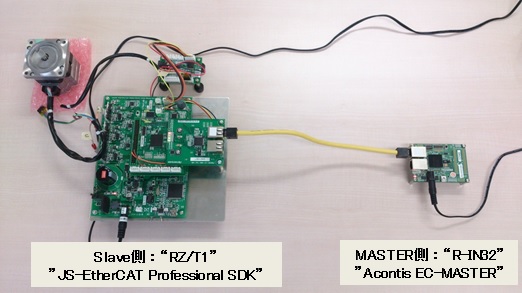
デモのご紹介
デモ構成
以下の様にデモをご用意しております。
■EtherCAT MASTER
– R-IN : acontis社 “EC-MASTER”![]()
■EtherCAT SLAVE
– RZ/T1 : “JS-EtherCAT Professional SDK” + CiA402機能パッケージMASTER側からSLAVE側の
モーターをCiA402でコントロール(正転⇔逆転の繰り返し制御)を行っているデモとなります。
デモ機 構成図
評価版
お問い合わせ
ご不明点、ご質問等 御座いましたら、お気軽に『お問い合わせフォーム』、もしくは、お電話にて
お問合せ下さい。また、”JS-EtherCAT Professional SDK” for RZ/T1 を使用したデモ機もご用意しております。
直接ご訪問させて頂き、デモと合わせて、より詳細な仕様などのご説明も可能ですので、
こちらもお気軽にご連絡下さい。
お問合せ下さい。また、”JS-EtherCAT Professional SDK” for RZ/T1 を使用したデモ機もご用意しております。
直接ご訪問させて頂き、デモと合わせて、より詳細な仕様などのご説明も可能ですので、
こちらもお気軽にご連絡下さい。